Detail SERVOMECHANISM
Servomechanism
Industri servomotor
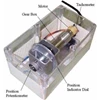
Silinder abu-abu / hijau adalah sikat-jenis motor DC. Bagian hitam di bagian bawah berisi pengurangan gigi planet, dan benda hitam di atas motor adalah rotary encoder optik untuk umpan-balik posisi. Ini adalah aktuator kemudi sebuah kendaraan robot yang besar.
Sebuah servo, kadang-kadang disingkat menjadi servo, adalah perangkat otomatis yang menggunakan kesalahan-sensing umpan balik negatif untuk memperbaiki kinerja mekanisme.
Istilah benar hanya berlaku untuk sistem di mana sinyal umpan balik atau koreksi kesalahan membantu posisi kontrol mekanik, kecepatan atau parameter lainnya. Sebagai contoh, kontrol listrik otomotif jendela bukanlah servo, karena tidak ada umpan balik otomatis yang mengontrol posisi-operator ini dilakukan dengan observasi. Sebaliknya cruise control mobil menggunakan umpan balik loop tertutup, yang mengklasifikasikan sebagai sebuah servo.
Posisi kontrol
Jenis umum dari servo menyediakan kontrol posisi. Servos umumnya listrik atau sebagian elektronik di alam, menggunakan motor listrik sebagai sarana utama untuk menciptakan kekuatan mekanik. Jenis lain dari servos menggunakan hidrolik, pneumatik, atau prinsip-prinsip magnetik. Servos beroperasi pada prinsip umpan balik negatif, di mana input kontrol dibandingkan dengan posisi yang sebenarnya dari sistem mekanik yang diukur oleh beberapa jenis transduser pada output. Selisih antara nilai aktual dan diinginkan ( suatu " kesalahan sinyal" ) diperkuat ( dan dikonversi) dan digunakan untuk menggerakkan sistem ke arah yang diperlukan untuk mengurangi atau menghilangkan kesalahan. Prosedur ini merupakan salah satu aplikasi yang banyak digunakan dari teori kontrol.
Kontrol kecepatan
Kecepatan kontrol melalui gubernur adalah jenis lain dari servo. Mesin uap menggunakan gubernur mekanik, aplikasi lain awal adalah untuk mengatur kecepatan roda air. Sebelum Perang Dunia II baling-baling kecepatan konstan dikembangkan untuk mengontrol kecepatan mesin untuk pesawat manuver. Bahan Bakar kontrol untuk mesin turbin gas menggunakan memerintah baik hydromechanical atau elektronik.
Lain
Servomechanisms Positioning pertama kali digunakan dalam peralatan navigasi militer api-kontrol dan kelautan. Servomechanisms saat ini digunakan dalam peralatan mesin otomatis, satelit-pelacakan antena, pesawat remote control, sistem navigasi otomatis pada kapal dan pesawat, dan antipesawat-gun sistem kontrol. Contoh lain adalah fly-by-wire sistem di pesawat yang menggunakan servos untuk menjalankan kontrol permukaan pesawat, dan radio kontrol model yang menggunakan servos RC untuk tujuan yang sama. Kamera autofocus Banyak juga menggunakan servo untuk menggerakkan lensa secara akurat, dan dengan demikian mengatur fokus. Sebuah hard disk modern hard memiliki sistem servo magnetik dengan sub-micrometre akurasi posisi. Dalam mesin industri, servos digunakan untuk melakukan gerakan yang kompleks.
Putar atau linier
Servos Khas memberikan output ( sudut) rotary. Jenis linier yang umum juga, menggunakan leadscrew atau motor linier untuk memberikan gerakan linier.
Servomotor
Servomotor adalah motor yang merupakan bagian dari suatu servo. Servomotor ini dipasangkan dengan beberapa jenis encoder untuk memberikan posisi / umpan balik kecepatan. Sebuah motor stepper adalah salah satu jenis servomotor. Sebuah motor stepper sebenarnya dibangun untuk memindahkan posisi sudut berdasarkan setiap langkah mungkin sekitar rotasi keseluruhan, dan mungkin termasuk microsteps dengan resolusi seperti 256 microsteps per langkah dari motor stepper. Sebuah servo mungkin atau mungkin tidak menggunakan servomotor a. Sebagai contoh, sebuah tungku rumah tangga yang dikendalikan oleh termostat adalah servo, karena dari umpan balik dan sinyal error yang dihasilkan, namun tidak ada motor yang dikendalikan langsung oleh servo tersebut.
Sejarah
Uap Gubernur mesin James Watt umumnya dianggap sebagai sistem umpan balik pertama bertenaga. The fantail kincir angin adalah contoh awal dari kontrol otomatis, tapi karena tidak memiliki penguat atau keuntungan, hal ini biasanya tidak dianggap suatu servo.
Posisi umpan balik perangkat kontrol pertama adalah kemudi kapal mesin, digunakan untuk posisi kemudi kapal besar berdasarkan posisi roda kapal. Teknologi ini pertama kali digunakan pada SS Great Eastern tahun 1866. Mesin uap steering memiliki karakteristik servo modern: input, output, sinyal kesalahan, dan sarana untuk memperkuat sinyal error yang digunakan untuk umpan balik negatif untuk mengarahkan kesalahan menuju nol. Kekuatan Ragonnet Mekanisme terbalik adalah udara tujuan umum atau bertenaga uap penguat servo untuk gerakan linier dipatenkan pada tahun 1909.
Servomechanisms listrik yang digunakan pada awal 1888 di Elisha Gray Telautograph.
Servomechanisms listrik memerlukan power amplifier. Perang Dunia II melihat perkembangan listrik api kontrol servomechanisms, menggunakan amplidyne sebagai power amplifier. Vakum amplifier tabung yang digunakan dalam tape drive UNISERVO untuk komputer UNIVAC I. The Royal Navy mulai bereksperimen dengan Power Control Remote ( RPC) di HMS Champion pada tahun 1928 dan mulai menggunakan RPC untuk mengontrol sorot di awal 1930-an. Selama WW2 RPC digunakan untuk mengendalikan tunggangan senjata dan direksi senjata.
Servomechanisms modern menggunakan power amplifier solid state, biasanya dibangun dari perangkat MOSFET atau thyristor. Servos kecil dapat menggunakan transistor daya.
Asal usul kata tersebut diyakini berasal dari Perancis " Le Servomoteur" atau slavemotor tersebut, pertama kali digunakan oleh JJL Farcot tahun 1868 untuk menggambarkan mesin hidrolik dan uap untuk digunakan dalam kemudi kapal.
Jenis paling sederhana dari servos menggunakan bang-bang control. Sistem kontrol yang lebih kompleks menggunakan kontrol proporsional, kontrol PID, kontrol negara dan ruang, yang dipelajari dalam teori kontrol modern.
RC servos
Kecil R / C servo mekanisme
1. motor listrik
2. posisi potensiometer umpan balik
3. pengurangan gigi
4. lengan aktuator
Untuk detail lebih lanjut tentang topik ini, lihat Servo ( radio kontrol) .
Servos RC adalah hobi perangkat kontrol servos biasanya bekerja di radio kontrol model terpencil, di mana mereka digunakan untuk menyediakan aktuasi untuk sistem mekanik berbagai seperti kemudi mobil, permukaan kontrol pada pesawat, atau kemudi perahu.
Karena keterjangkauan mereka, kehandalan, dan kesederhanaan kontrol oleh mikroprosesor, servos RC sering digunakan dalam skala kecil aplikasi robotika.
Servos RC terdiri dari sebuah motor listrik mekanis terkait dengan potensiometer. Sebuah penerima RC standar mengirimkan pulse-width modulasi ( PWM) sinyal ke servo. The elektronik di dalam servo menerjemahkan lebar pulsa ke posisi. Ketika servo diperintahkan untuk memutar, motor ini didukung sampai potensiometer mencapai nilai sesuai dengan posisi yang diperintahkan.
Jenis pertunjukan
Servos dapat diklasifikasikan dengan cara sistem kontrol umpan balik mereka.
ketik 0 servos: di bawah kondisi mapan kondisi mereka menghasilkan nilai konstan output dengan sinyal kesalahan konstan;
• tipe 1 servos: di bawah kondisi mapan kondisi mereka menghasilkan nilai konstan output dengan sinyal kesalahan nol, namun tingkat konstan perubahan referensi menyiratkan kesalahan konstan dalam pelacakan referensi;
• tipe 2 servos: di bawah kondisi mapan kondisi mereka menghasilkan nilai konstan output dengan sinyal kesalahan nol. Tingkat konstan perubahan referensi menyiratkan kesalahan nol dalam pelacakan referensi. Tingkat konstan percepatan referensi menyiratkan kesalahan konstan dalam pelacakan referensi.
Bandwidth servo menunjukkan kemampuan servo untuk mengikuti perubahan yang cepat pada input diperintahkan.
Tampilkan Lebih Banyak